
元エンジニアの院長の「昔話」投稿です。
目次
(2)-4 JAXA 技術試験衛星 きく7号 (ETS-Ⅶ)
(1) まえがき
先日(2021年5月)、日本のアストロスケール社が、英OneWeb社などが参画する 英国の宇宙デブリ除去研究の契約に署名されました。
これに関連して、昔 サラリーマン時代に一緒だった M君の話を書き残しておこうと思います。
日本初の宇宙機ドッキング用 近傍域センサの開発で、主となって活躍した M君の偉業を讃えます。
アストロスケール社が予定している ELSA-d衛星の実験は、寿命が尽きた衛星を模擬した物体にドッキングして、共に大気圏に突入して燃え尽きる手順のようです。 今夏(2021年夏)実証予定。
(2) 宇宙機の接近・ドッキングと航法センサの例
ここで まず、宇宙ステーションと補給船HTV(愛称 … コウノトリ)のドッキング(※)のような、宇宙機の接近(ランデブ)・ドッキングの概要と、その際に用いられる航法センサについて説明します。

【 ※注 … 宇宙ステーションと コウノトリの結合は ロボットアームを使って コウノトリを掴み 宇宙ステーション側に引き寄せて 最終結合します。 このようなロボット等を用いた結合は 厳密には docking ではなく berthing(バーシング )と呼ばれますが 本投稿では簡便に「ドッキング」のみの表記とします。 詳細は Wikipedia 宇宙機のドッキングおよび係留 参照 】
二つの物体が機械的にドッキングするには、互いの相対的距離(位置)や姿勢(角度)がわかっていないと、ガチャッと引っ付くことができませんので、誘導するための航法センサが必要となります。
(2)-1 JAXA コウノトリ(HTV)
コウノトリ(HTV:H-II Transfer Vehicle)は、前掲図のように 宇宙ステーションの下側(地球側)に引っ付きます。
コウノトリの場合の航法センサは、
● 遠方 〜 500mまで接近するのにGPSを使い、
● 次の500〜10mの間は LIDAR(レーザーレーダー。 ランデブセンサ)を使うようです。
(2)-2 SpaceX社 Cargo Dragon
米SpaxeX社の補給船 Cargo Dragon が、2020年12月に宇宙ステーションにドッキングしました。 ロボットアーム無しの自動ドッキングのようです。

航法センサ
“DragonEye”という、LIDARと “Thermal imaging sensor” (赤外線カメラ?)の機能を有するセンサがあるようですが、詳細は不明です。
(2)-3 OneWeb社
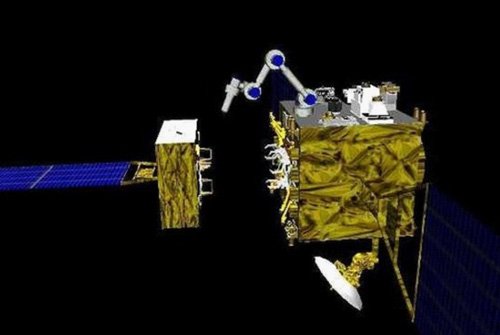
OneWeb社は 次のような ロボットアームを使った構想も提示されています。
提示されているのを見ると 磁力により結合する方式のようであり、そのためのプレートを廃棄対象に あらかじめ装着しておくようです。
宇宙機のドッキングというよりも、ロボットアームでつながった状態にして、大気圏へ墜落させるところまで引っ張ってゆくという感じでしょうか。
センサについては、ロボットアームの先端に、この動画の黒白パターンを認識するイメージセンサなどを搭載すると想像します(後述の宇宙ステーションのロボットアーム先端と同様?)。
(2)-4 JAXA 技術試験衛星 きく7号 (ETS-Ⅶ)
JAXAの技術試験衛星(ETS:Engineering Test Satellite)シリーズの7号機目が1997年に打ち上げられ、ランデブ・ドッキング技術と宇宙ロボット技術の実験が行われました。
(厳密に言いますと 当時は JAXA ではなく NASDA という団体名でした)
下図のように きく7号は、おりひめ衛星(小さい方)とひこぼし衛星(大きい方)の二つから成ります。

バブル景気の少し前から基礎研究が始まり、10年以上経った 1998年の七夕の日に おりひめ衛星とひこぼし衛星がドッキングしました。
航法センサ
1)両衛星の距離が10km~500mにある時の両者の相対的な位置測定にGPSを使用、
2)500m~2mではLIDAR(ランデブ・レーダー)を使用、
3)2m~0.3mでは画像センサ(通称 … 近傍センサ)を使う。
この近傍センサの開発に、M君のアイデアが大活躍しました。
(3) ドッキング用 近傍域センサ/モニタ
前述のように、ドッキングする宇宙機の相対距離が2m程度まではLIDARを使いますが、2m未満の近傍域では 前述 ETS-Ⅶのように 別途センサまたはモニタが必要となります。
(3)-1 ETS-Ⅶ
日本には この近傍域のセンサの宇宙実績が無かったので、ETS-Ⅶの実験のために新規開発することとなりました。
具体的には、二つの宇宙機間の 相対的な位置(X,Y,Z)と姿勢(ロール,ピッチ,ヨー)の6自由度のズレ、および接近速度について、ドッキング・メカニズムの捕獲可能範囲にあるか否かを検知するセンサです。 メカ的な捕獲性能と近傍センサの検出性能との すり合わせの設計となりました。
そして ドッキング実験の前提条件として、将来宇宙機ドッキングへの流用を想定して 以下が設定されました。
● ひこぼし衛星側(チェイサ)には、駆動するメカニズムや、電子制御のセンサなど、機能性を有する機器を搭載できる。
● おりひめ衛星側(ターゲット)には、可動しない固定の構造や 完全にパッシブで無通電の器材のみ搭載する。
結果から先に示しますが、以下がETS-Ⅶの近傍センサの外観図(地上試験用)です。 左が おりひめ衛星に付けたターゲットマークで、右が ひこぼし衛星に搭載したセンサ・ヘッド部です。
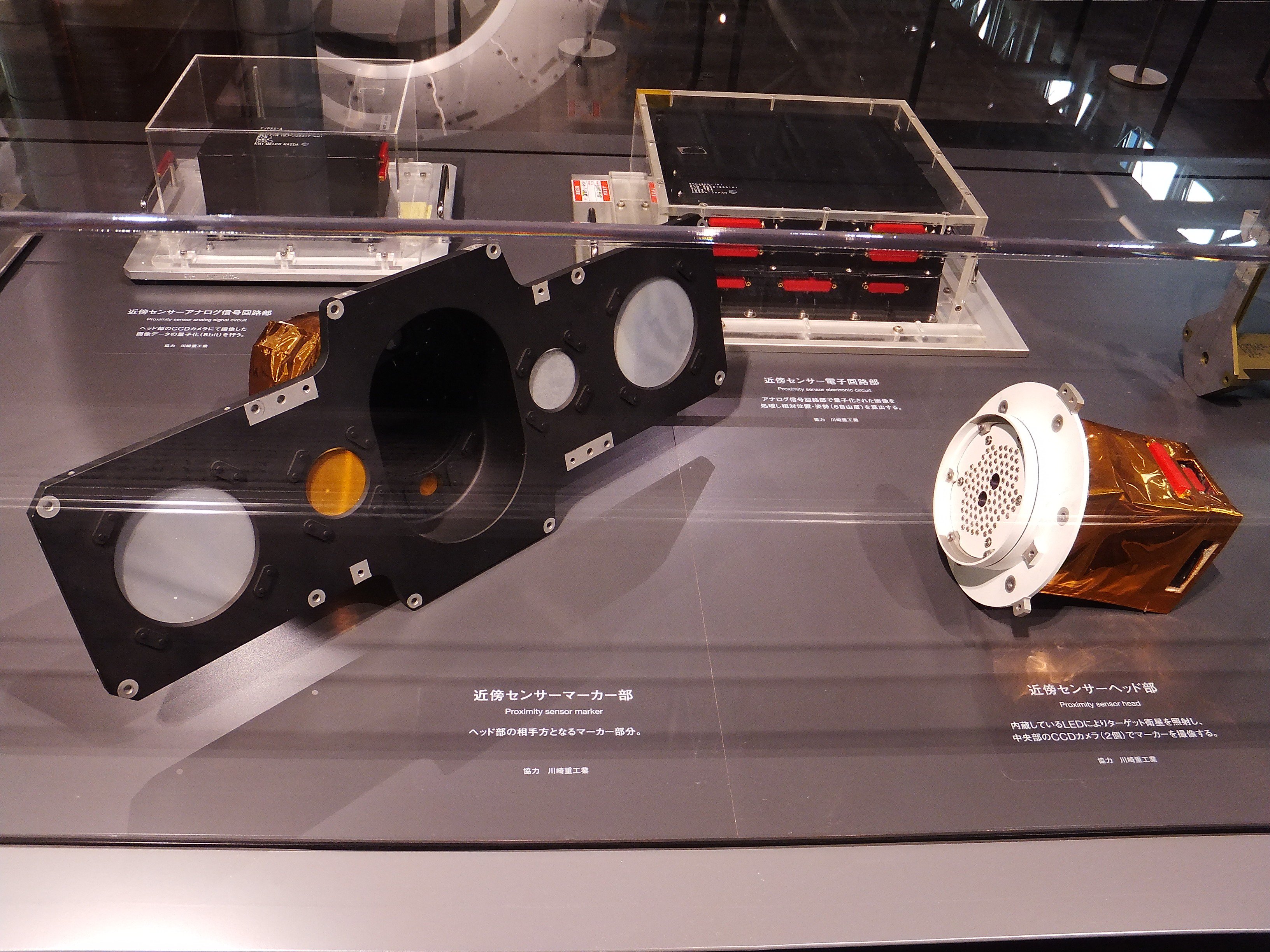
センサ・ヘッド部には 既存のカメラを採用し、ターゲットマークをパターン認識するなどの画像処理技術は既存のものがありましたが、次の悪条件があるので ターゲットマークの認識性能を確保するのに苦労しました。
● 前述のように おりひめ衛星側は完全に無通電の条件なので、点灯するマークなどは付けられない。
● おりひめ衛星は ピカピカ反射する 金色のサーマルブランケットで包まれている。
● おりひめ衛星のドッキング面は 凹凸の無い平面であり、かつ ドッキング用のバーや他のセンサなど、色々なものが装備されているので、太陽光の入射角度により反射してしまう。
現代のようにAI・MLなどが普及していない時代の悩みとも言えます。
また、前述の Cargo Dragon の映像を見ると ドッキングするまで みょうに薄暗く感じると思います。 そして、ドッキング完了後、一斉にステーションのライトが点灯して明るくなります。 何らかの光学条件があると想像しますが、ハズレてたら どなたか ご指摘お願いします。
(3)-2 宇宙ステーション/シャトル
以下は、宇宙ステーション/シャトルで使われているターゲットマーク(Grapple Target)、Grapple Fixture、End Effector です。
ロボットアームの先端に End Effector が付いていて、CCTV Camera によって Grapple Target をモニタしながら掴むようです。
コウノトリの真ん中あたりにも、Grapple Target と Grapple Fixture が装備されています。

(3)-3 アストロスケール社 ELSA-d衛星
前述の ELSA-d衛星の動画にも出てきますが、次のようなターゲットマークが発表されました。
また、前述のETS-Ⅶの条件とは異なり、磁力を使うということと、プレートから信号を出す機能があるとのこと。
【 アストロスケール、宇宙ごみ除去で衛星 19年にも打ち上げ 2017/04/19 日本経済新聞より抜粋 】
。。。今回は実証事業で、宇宙ごみに見立てた衛星を一緒に打ち上げる。あらかじめ金属プレートを取りつけておき、除去を担当する衛星が電波を出すとプレートから信号が出て居場所を知らせる。除去衛星は宇宙ごみに近づくと磁力で引き寄せてくっつき、離れないようにする。最後は大気圏に一緒に落ちて燃え尽きる。。。
(3)-4 M-3SⅡロケットでの要素研究
1990年頃、ETS-Ⅶ近傍センサの関連として、当時の NASDA ではなく 宇宙科学研究所 ISAS の M-3SⅡロケットを使って要素研究できるチャンスが訪れました。
ロケット打ち上げにおいて、2段目と3段目の分離時の 互いの相対位置・姿勢を計測するという、数秒間の実験でした。 通称 … DEX:Determination Experiment(※確か このような用語定義だったと記憶しますが…)。
センサの搭載条件や環境は ETS-Ⅶ近傍センサと だいぶ異なりますが、「センサ・ヘッド部にカメラを使って既存の画像処理技術で検出する」「ターゲットマークは無通電のもの」という仕様は同じとしました。
そして 設計初期段階で、まさに ELSA-d衛星のマークと似通った円形も候補に上がりましたが、打ち上げ時の光学条件に対して、カメラのダイナミックレンジや感度補正に依存した仕様では 実現不可能でした。
しかしながら、M君のアイデアで(時にはユニークな発想の転換で) 様々な課題を切り抜けることができました。
ターゲットマークの照度や画像認識性能を上げるための工夫や 反射材料の選定に至るまで、M君の提案を中心に設計が進みました。
当時、他事業所から 画像処理技術に長ける 上司がサポートに来てくれていましたが、ある時の会議中で M君が出したアイデアに「なるほど!」と うなったのを 今でも忘れられません。
(3)-5 M-3SⅡロケット6号機・7号機での実験
M-3SⅡロケットの6号機(M-3SⅡ-6)に DEX を搭載することが決まり、諸々の地上試験を経て、1991年に打ち上げられました。
しかしながら、打ち上げカウントダウンが始まった頃、DEXのカメラ映像が周期的に乱れ始めました。
通信の問題か 何かの電磁干渉だと思われましたが、DEXは ロケット全体の中では優先度の低い 相乗りミッションだったので、カウントダウンは止められず ロケットは打ち上がりました。
乱れた映像では相対位置・姿勢の検出はできませんでした。
でも、M-3SⅡロケット7号機(M-3SⅡ-7)で再度トライできることとなりました。
DEX の設計仕様も 6号機と同じとせず、オンボードで画像処理・相対位置姿勢データの解析までできるよう、機能をアップしました。
1993年、7号機は無事打ち上がり、DEX も数秒間の画像処理が成功しました!
(4) あとがき
M-3SⅡロケットでの要素研究を経て、前述のように ETS-Ⅶの試験は成功しました。 (衛星バス側に一部不具合がありましたが)
近傍域のセンサの開発を通して、NASAの Grapple Target が なぜ あの形状・パターン・大きさになっているか、その理由が僕たちには わかりましたし、SpaceX社 Cargo Dragon の動画に映っている ステーション側のマークの仕様も、近傍センサと似通っている点があると考えます。
そして、僕たちが課せられた条件では無理だった ELSA-d衛星のターゲットマークを使ったセンシングが、新しい技術でクリアされるのが楽しみです。
近傍センサの検出分解能などの性能を評価するために、それを上回る精度の試験装置を新たに作って検査するなど、20世紀のゴリゴリとした作業が、新しい技術と比べると懐かしく感じます。
◆ ◆ ◆ ◆ ◆ ◆ ◆
やがて、ETS-Ⅶの搭載品を納入して 運用フェーズに入った時点で、僕は 別な研究グループに転属し、M君も別な部署に転属となりました。
僕は 次の研究が 一段落した時点で また転属となり、その数年後 退社したので、もうM君と会うことは無くなりました。
。。。M君、あなたの近傍センサを想うと何杯でもいけるよッ! 今でも。。。
コメント